
停了半年 的 Udacity Self Driving Car (SDC) Program, 終於又開始了. 做為 Term3 的第一個 Project, 我抱著高度的期待. 不過完成後, 有點小失望. 失望的原因是這個 project 跟課程上的連結感覺不是那麼明顯. 例如課程上有講到 A*, hybrid A* 的算法, 但 project 是模擬 highway drive, 因此 A* 比較不適合 (適合在 parking lot 場景). 另外也有提到怎麼降低 jerk (加速度的微分, 主要是不舒適的來源), 當參考內容是很好, 不過在寫 Project 時感覺也不大需要.
這篇就是個紀錄, 會很水. 方法很簡單, 一張圖解決:
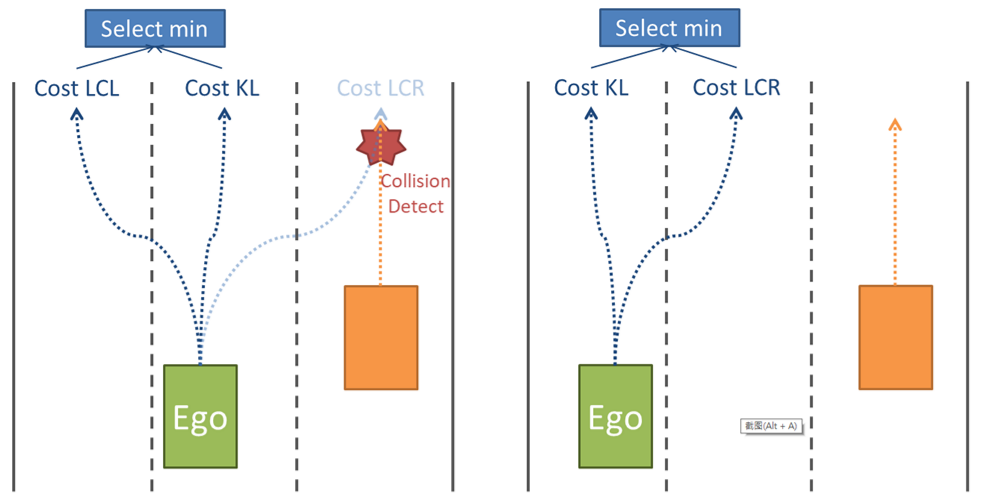
ego-car 根據自己所在的車道, 最多可以有三條路徑選擇, 路徑就用 spline curve 產生, 確保夠 smooth. 同時有 sensor-fusion 的資料可以知道其他車子的狀況, 然後利用 prediction model 去預測其他車的路徑 (我就單純使用 constant velocity 線性路徑). 如果有 collision 在未來的 1 or 1.5 秒, 該路徑就無效. 另外, 如果有車子太靠近, 就減速.
ego-car 的每個路徑都會有各自的 cost, cost 是根據一些喜好, 譬如哪一條車道可以跑得比較快, 哪一條路徑比較不會跟其他車子太接近等等… 這 Project 最麻煩的就是在設計 cost function, 和調整. (還有熟悉 project 的程式碼…麻煩阿)
影片連結 here. Project github here
沒了, 文章水不水 ? 好水阿, 真心虛