前一陣子學習了 Variational Inference, 因為自己記性只有 LSTM 沒有 L, 所以趕快記下筆記. 學得還是很粗淺, 又是一個大坑阿.
監督學習不外乎就是 training 和 testing (inference). 而 inference 在做的事情就是在計算後驗概率 $p(z|x)$. 在 PGM 中通常是 intractable, 或要找到 exact solution 的計算複雜度太高, 這時 VI 就派上用場了. VI 簡單講就是當 $p(z|x)$ 不容易得到時, 可以幫你找到一個很好的近似, $q(z)$.
放上一張 NIPS 2016 VI tutorial 的圖, 非常形象地表示 VI 做的事情: 將找 $p(z|x)$ 的問題轉化成一個最佳化問題.
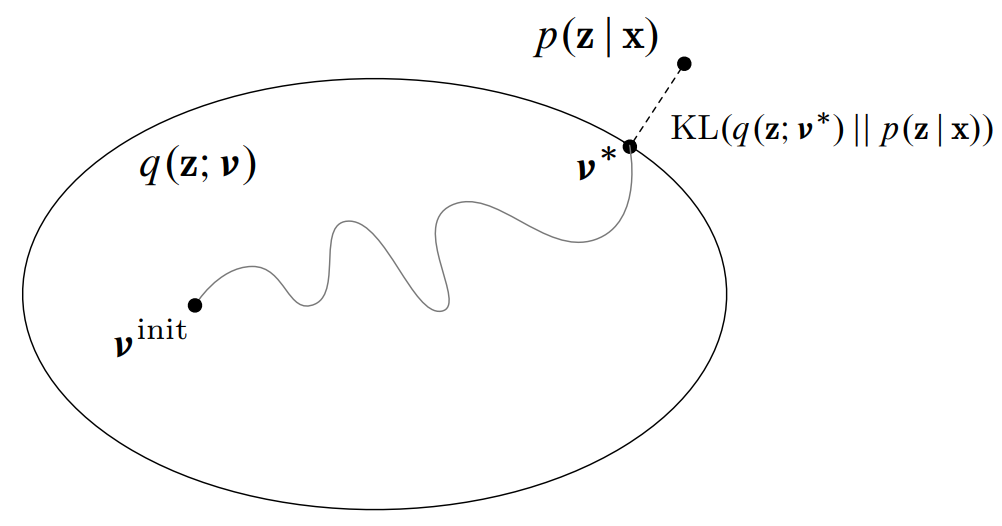
怎麼看作最佳化問題?
我們要找到一個 $q(z)$ 去逼近 $p(z|x)$, 因此需要計算兩個機率分佈的距離, 而 KL-divergence 是個很好的選擇 (雖然不滿足數學上的距離定義). 所以我們的目標就是希望 $KL(q(z)\Vert p(z|x))$ 愈小愈好, 接著我們對 KL 定義重新做如下的表達:
$$\begin{align} KL\left(q(z)\Vert p(z|x)\right)=-\sum_z q(z)\log\frac{p(z|x)}{q(z)}\\ =-\sum_z q(z)\left[\log\frac{p(x,z)}{q(z)}-\log p(x)\right]\\ =-\sum_z q(z)\log\frac{p(x,z)}{q(z)}+\log p(x) \end{align}$$得到這個非常重要的式子:
$$\begin{align} \log p(x)=KL\left(q(z)\Vert p(z|x)\right)+ \color{red}{ \sum_z q(z)\log\frac{p(x,z)}{q(z)} } \\ =KL\left(q(z)\Vert p(z|x)\right)+ \color{red}{ \mathcal{L}(q) } \\ \end{align}$$為什麼做這樣的轉換呢? 這是因為通常 $p(z|x)$ 很難得到, 但是 complete likelihood $p(z,x)$ 通常很好求.
觀察 (5), 注意到在 VI 的設定中 $\log p(x)$ 跟我們要找的 $q(z)$ 無關, 也就造成了 $\log p(x)$ 是固定的. 由於 $KL\geq 0$, 讓 $KL$ 愈小愈好等同於讓 $\mathcal{L}(q)$ 愈大愈好. 因此 VI 的目標就是藉由最大化 $\mathcal{L}(q)$ 來迫使 $q(z)$ 接近 $p(z|x)$.
$\mathcal{L}(q)$ 可以看出來是 marginal log likelihood $\log p(x)$ 的 lower bound. 因此稱 variational lower bound 或 Evidence Lower BOund (ELBO).
ELBO 的 gradient
我們做最佳化都需要計算 objective function 的 gradient. 讓要找的 $q$ 由參數 $\nu$ 控制, i.e. $q(z;\nu)$, 所以我們要找 ELBO 的 gradient 就是對 $\nu$ 微分.
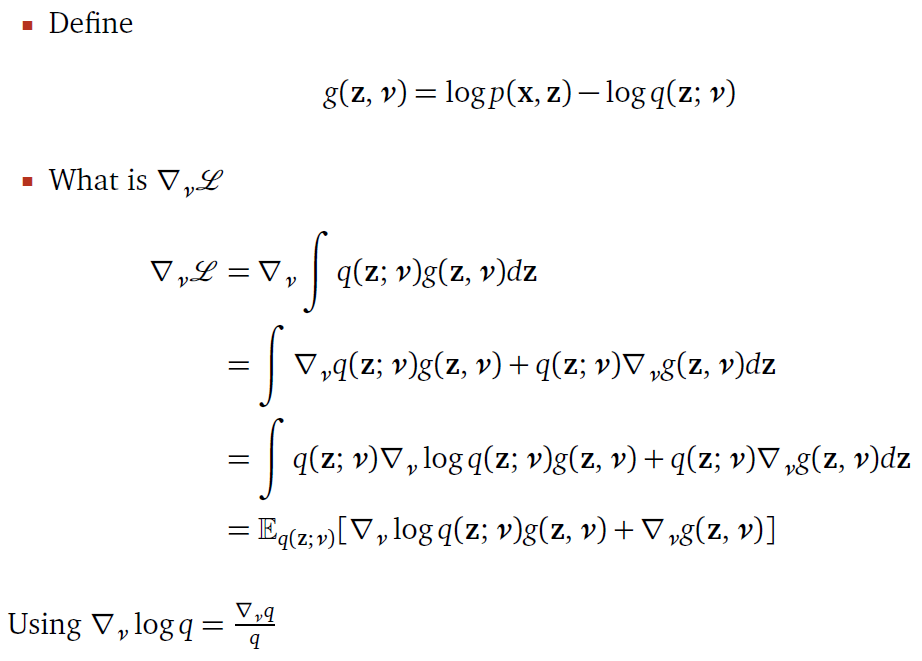
$$\begin{align} \mathcal{L}(\nu)=\mathbb{E}_{z\sim q}\left[\log p(x,z) - \log q(z;\nu)\right]\\ \Rightarrow \nabla_{\nu}\mathcal{L}(\nu)=\nabla_{\nu}\left(\mathbb{E}_{z\sim q}\left[\log p(x,z) - \log q(z;\nu)\right]\right)\\ \mbox{Note }\neq \mathbb{E}_{z\sim q}\left(\nabla_{\nu}\left[\log p(x,z) - \log q(z;\nu)\right]\right)\\ \end{align}$$注意 (8) 不能將 Expectation 與 derivative 交換的原因是因為要微分的 $\nu$ 與要計算的 Expectation 分布 $q$ 有關. 下面會提到一個很重要的技巧, Reparameterization trick, 將 Expectation 與 derivative 交換, 而交換後有什麼好處呢? 下面提到的時候再說明.
回到 (7) 展開 Expectation 繼續計算 gradient, 直接用 NIPS slide 結果如下:
計算一個機率分佈的 Expectation 可用 Monte Carlo method 採樣, 例如採樣 $T$ 個 samples
$$\begin{align}
\mathbb{E}_{z\sim q}f(z)\approx\frac{1}{T}\sum_{t=1}^Tf(z)\mbox{, where }z\sim q
\end{align}$$
因此 gradient 可以這麼大致找出來, 不過這方法找出來的 gradient 與真實的 gradient 存在很大的誤差, 換句話說, 這個近似的 gradient variance 太大了. 原因兩個
- $q$ 本身就還在估計, 本身就不準確了
- Monte Carlo method 採樣所造成的誤差
下一段的 reparameterization trick 就可以去除掉上面第一個誤差, 因此估出來的 gradient 就穩定很多.
Reparameterization Trick
我們用 Gaussian 舉例, 令 $q$ 是 Gaussian, $q(z;\mu,\sigma)=\mathcal{N}(\mu,\sigma)$, 其中 $\nu=${$\mu,\sigma$}, 而我們其實可以知道 $z=\mu+\sigma \epsilon$, where $\epsilon\sim\mathcal{N}(0,\mathbf{I})$. 因此:
$$\begin{align}
\mathcal{L}(\nu)=\mathbb{E}_{z\sim q}\left[\log p(x,z)-\log q(z;\nu)\right]\\
=\mathbb{E}_{
\color{red}{
\epsilon\sim \mathcal{N}(0,\mathbf{I})
}
}\left[\log p(x,
\color{red}{
\mu+\sigma \epsilon
}
)-\log q(
\color{red}{
\mu+\sigma \epsilon
}
;\nu)\right]
\end{align}$$
這時候我們計算 ELBO 的 gradient 時, 我們發現 $\nu$ 與 Expectation 的分佈, $\mathcal{N}(0,\mathbf{I})$, 無關了! 因此 (7) 套用上面的 trick 就可以將 Expectation 與 derivative 交換. 結果如下:
$$\begin{align} \nabla_{\mu}\mathcal{L}(\nu)=\mathbb{E}_{\epsilon\sim \mathcal{N}(0,\mathbf{I})}\left[\nabla_{\mu}\left(\log p(x,\mu+\sigma \epsilon) - \log q(\mu+\sigma \epsilon;\nu)\right)\right]\\ \approx\frac{1}{T}\sum_{t=1}^T \nabla_{\mu}\left( \log p(x,\mu+\sigma \epsilon) - \log q(\mu+\sigma \epsilon;\nu) \right)\mbox{, where }\epsilon\sim\mathcal{N}(0,\mathbf{I})\\ \end{align}$$在上一段計算 ELBO gradient 所造成誤差的第一項原因就不存在了, 因此我們用 reparameterization 得到的 gradient 具有很小的 variance. 這個 github 做了實驗, 發現 reperameterization 的確大大降低了估計的 gradient 的 variance.
$$\begin{align} \nabla_{\mu}\left(\log p(x,\mu+\sigma \epsilon) - \log q(\mu+\sigma \epsilon;\nu)\right) \end{align}$$怎麼計算呢? 我們可以使用 Tensorflow 將要計算 gradient 的 function 寫出來,
tf.gradients就能算
VAE
Variational Inference 怎麼跟 Neural Network 扯上關係的? 這實在很神奇.
我們先來看看 ELBO 除了 (6) 的寫法, 還可以這麼表示:
我們讓 $p(x|z)$ 被參數 $\theta$ 所控制, 所以最後 ELBO 如下:
$$\begin{align}
\mathcal{L}(\nu,\theta)=\mathbb{E}_{z\sim q}\left[ \log
\color{orange}{
p(x|z,\theta)
}
\right] - KL(
\color{blue}{
q(z;\nu)
}
\|p(z))\\
\end{align}$$
讓我們用力看 (19) 一分鐘
接著在用力看 (19) 一分鐘
最後在用力看 (19) 一分鐘
有看出什麼嗎? … 如果沒有, 試著對照下面這張圖
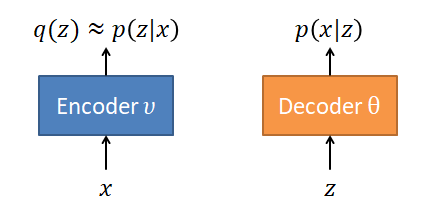
Encoder 和 Decoder 都同時用 NN 來學習, 這裡 $\nu$ 和 $\theta$ 分別表示 NN 的參數, 而使用 Reparameterization trick 來計算 ELBO 的 gradient (14) 就相當於在做這兩個 NN 的 backprop.
但是上圖的 Encoder 產生的是一個 pdf, 而給 Decoder 的是一個 sample $z$, 這該怎麼串一起? VAE 的做法就是將 $q(z)$ 設定為 diagonal Gaussian, 然後在這個 diagonal Gaussian 採樣出 $T$ 個 $z$ 就可以丟給 Decoder. 使用 diagonal Gaussian 有兩個好處:
- 我們可以用 reparameterization trick, 因此採樣只在標準高斯上採樣, 自然地 Encoder 的 output 就是 $\mu$ 和 $\sigma$ 了.
- (19)的 KL 項直接就有 closed form solution, 免掉算 expectation (假設$p(z)$也是Gaussian的話)
根據1, 架構改動如下:

將原來的 ELBO (10) 轉成 (19) 來看的話, 還可以看出一些資訊.
當最大化 (19) 的時候
- RHS 第一項要愈大愈好 (likelihood 愈大愈好), 因此這一項代表 reconstruct error 愈小愈好.
- RHS 第二項, 也就是 $KL(q(z;\nu)\Vert p(z))$ 則要愈小愈好. 因此會傾向於讓 $q(z;\nu)$ 愈接近 $p(z)$ 愈好. 這可以看做 regularization.
但是別忘了一開始說 VI 的做法就是藉由最大化 ELBO 來迫使 $q(z;\nu)$ 接近 $p(z|x)$, 而上面才說最大化 ELBO 會傾向於讓 $q(z;\nu)$ 接近 $p(z)$.
這串起來就說 $q(z;\nu)$ 接近 $p(z|x)$ 接近 $p(z)$. 在 VAE 論文裡就將 $p(z)$ 直接設定為 $\mathcal{N}(0,\mathbf{I})$. 因此整個 VAE 訓練完的 Encoder 的 $z$ 分布會有高斯分布的情形.
Conditional VAE (CVAE)
原來的 VAE 無法控制要生成某些類別的圖像, 也就是隨機產生 $z$ 不知道這會對應到哪個類別. CVAE 可以根據條件來產生圖像, 也就是除了給 $z$ 之外需要再給 $c$ (類別) 資訊來生成圖像. 怎麼辦到的呢? 方法簡單到我嚇一跳, 看原本論文有點迷迷糊糊, 但這篇文章解釋得很清楚! 簡單來說將原來的推倒全部加上 condition on $c$ 的條件. 從 (4) 出發修改如下:
$$\begin{align} \log p(x \color{red}{ | c } ) =KL\left(q(z \color{red}{ | c } )\Vert p(z|x, \color{red}{ c } )\right)+ \sum_z q(z \color{red}{ | c } )\log\frac{p(x,z \color{red}{ | c } )}{q(z \color{red}{ | c } )} \\ \end{align}$$用推導 VAE 一模一樣的流程, 其實什麼都沒做, 只是全部 conditioned on $c$ 得到 (19) 的 condition 版本
$$\begin{align} \mathcal{L}(\nu,\theta \color{red}{ | c } )=\mathbb{E}_{z\sim q}\left[ \log \color{orange}{ p(x|z,\theta, \color{red}{ c } ) } \right] - KL( \color{blue}{ q(z;\nu \color{red}{ | c } ) } \|p(z))\\ \end{align}$$這說明了我們在學 Encoder 和 Decoder 的 NN 時必須加入 conditioned on $c$ 這個條件! NN 怎麼做到這點呢? 很暴力, 直接將 class 的 one-hot 跟原來的 input concate 起來就當成是 condition 了. 因此 CVAE 的架構如下:

實作細節就不多說了, 直接參考 codes
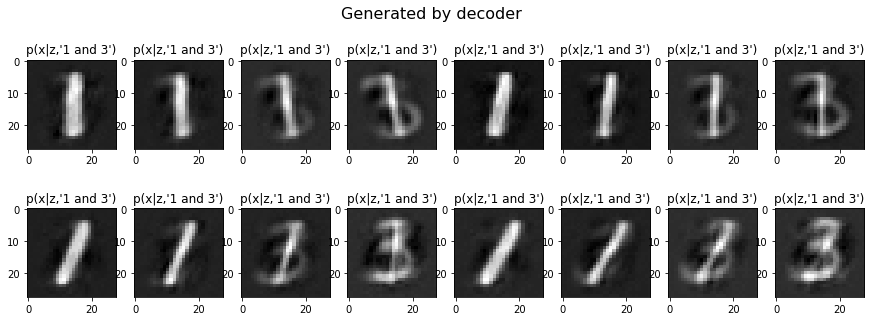
由於我們的 condition 是 one-hot, 如果同時將兩個 label 設定為 1, 是不是就能 conditioned on two classes 呢? 實驗如下
- conditioned on ‘0’ and ‘4’

- conditioned on ‘1’ and ‘3’
另外, 如果給的 condition 值比較小, 是不是就可以產生比較不是那麼確定的 image 呢? 我們嘗試 conditioned on ‘4’ 且值從 0.1 (weak) 到 1.0 (strong), 結果如下:
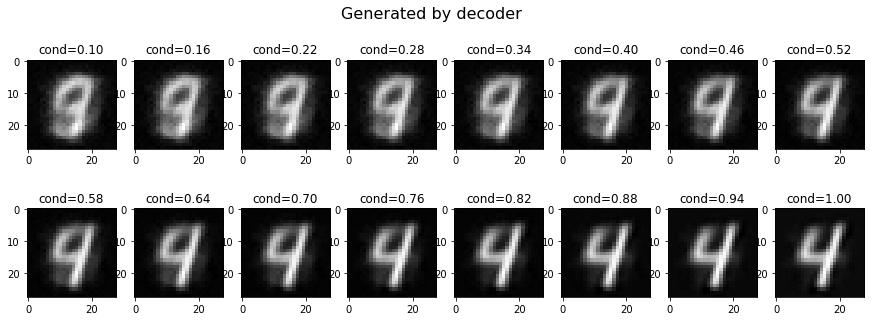
這個 condition 值大小還真有反應強度呢! Neural network 真的很神奇阿~
Mean Field VI
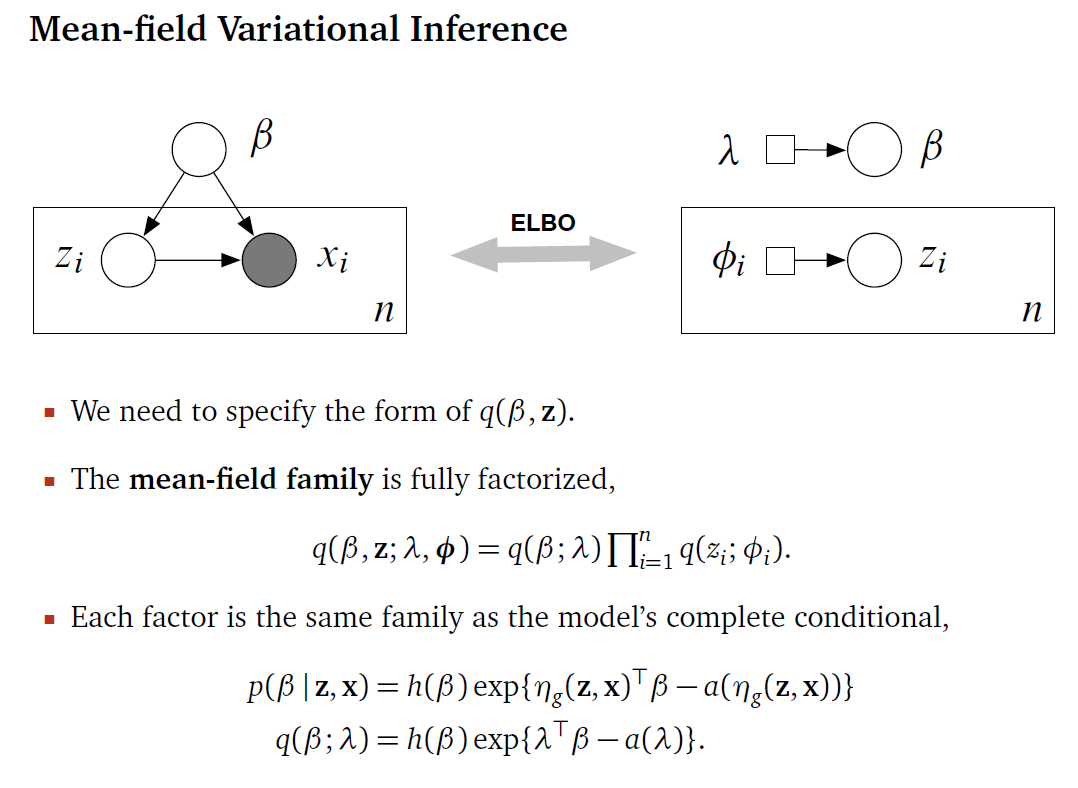
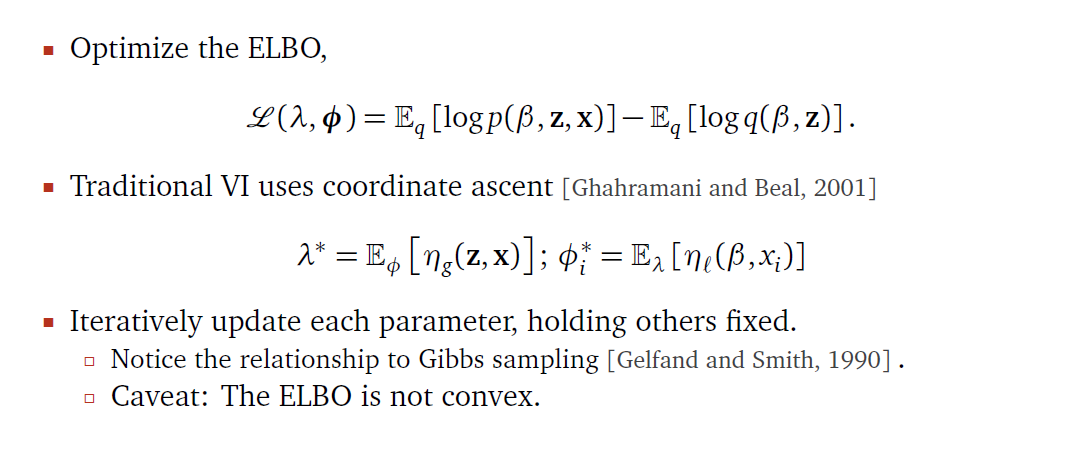
讓我們拉回 VI. Mean Field 進一步限制了 $q$ 的範圍, 它假設所有控制 $q$ 的參數 {$\nu_i$} 都是互相獨立的, 這樣所形成的函數空間稱為 mean-field family. 接著採取 coordinate ascent 方式, 針對每個 $\nu_i$ 獨立 update. 這種 fatorized 的 $q$ 一個問題是 estimate 出來的分布會太 compact, 原因是我們使用的指標是 $KL(q|p)$, 詳細參考 PRML Fig 10.2. 放上 NIPS 2016 slides, 符號會跟本文有些不同, 不過總結得很好:
另外想了解更多 Mean Field VI 或是透過例子了解, 推薦以以下兩個資料:
Reference
- Variational Inference tutorial series by Chieh Wu
- Variational Inference: Foundations and Modern Methods (NIPS 2016 tutorial)
- Reparameterization Trick
- Goker Erdogan 有很好的 VAE, VI 文章
- Conditional VAE 原論文
- Conditional VAE 好文章
- Variational Coin Toss by Björn Smedman
- My CVAE TF Practice
Appendix: EM 跟 VI 很像阿
在一般 EM 的設定上, 我們是希望找到一組參數 $\tilde{\theta}$ 可以讓 marginal likelihood $\log p(x|\theta)$ 最大, formally speaking:
$$\begin{align} \tilde{\theta}=\arg\max_\theta \log p(x|\theta) \end{align}$$如同 (4) 和 (5), 此時要求的變數不再是 $q$, 而是 $\theta$:
$$\begin{align} \log p(x|\theta)=KL\left(q(z)\Vert p(z|x,\theta)\right)+\sum_z q(z)\log\frac{p(x,z|\theta)}{q(z)}\\ =KL\left(q(z)\Vert p(z|x,\theta)\right)+ \color{orange}{ \mathcal{L}(q,\theta) } \\ \end{align}$$此時的 $\log p(x|\theta)$ 不再是固定的 (VI是), 而是我們希望愈大愈好. 而我們知道 $\mathcal{L}(q,\theta)$ 是它的 lower bound 這點不變, 因此如果 lower bound 愈大, 則我們的 $\log p(x|\theta)$ 就當然可能愈大.
首先注意到 (23) 和 (24) 針對任何的 $q$ 和 $\theta$ 等式都成立, 我們先將 $\theta$ 用 $\theta^{old}$ 以及 $q(z)$ 用 $p(z|x,\theta^{old})$ 代入得到:
$$\begin{align} \log p(x|\theta^{old})= KL\left(p(z|x,\theta^{old})\Vert p(z|x,\theta^{old})\right)+\mathcal{L}(p(z|x,\theta^{old}),\theta^{old})\\ =0+\mathcal{L}(p(z|x,\theta^{old}),\theta^{old})\\ \leq\max_{\theta}\mathcal{L}(p(z|x,\theta^{old}),\theta)\\ \end{align}$$接著求
$$\begin{align}
\theta^{new}=\arg\max_{\theta} \mathcal{L}(p(z|x,\theta^{old}),\theta)
\end{align}$$
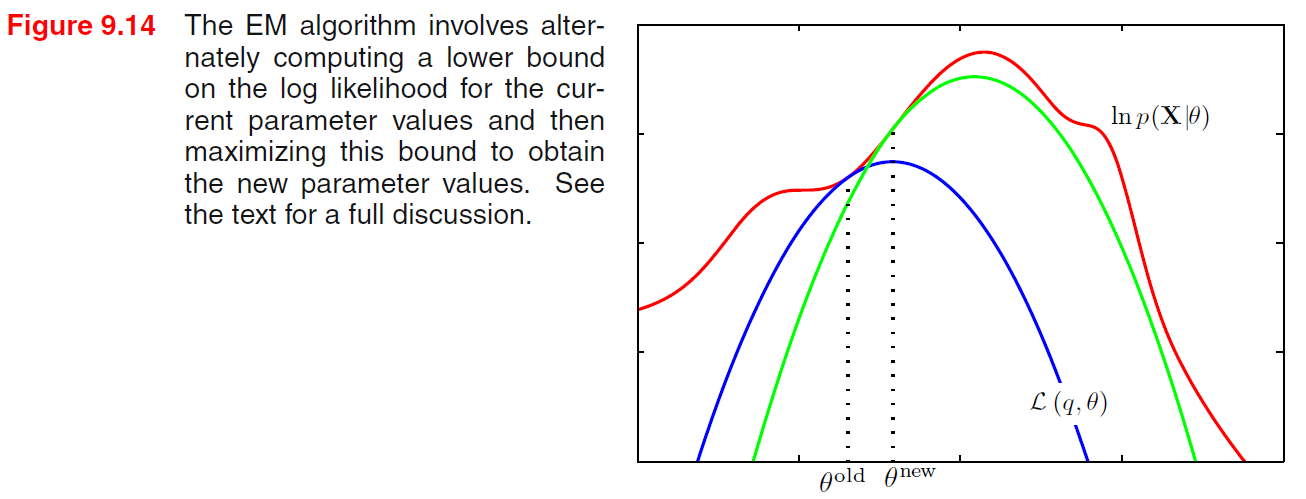
如此 lower bound 就被我們提高了.
(28) 就是 EM 的 M-step, 詳細請看 PRML Ch9.4 或參考下圖理解
“$q(z)$ 用 $p(z|x,\theta^{old})$ 代入” 這句話其實有問題, 因為關鍵不就是 $p(z|x,\theta)$ 很難求嗎? 這似乎變成了一個雞生蛋蛋生雞的情況. (就我目前的理解) 所以通常 EM 處理的是 discrete 的 $z$, 然後利用 $\sum_z p(x,z|\theta)$ 算出 $p(x|\theta)$, 接著得到我們要的 $p(z|x,\theta)$. 等於是直接簡化了, 但 VI 無此限制.