Coursera Stochastic Processes 課程筆記, 共十篇:
- Week 0: 一些預備知識
- Week 1: Introduction & Renewal processes
- Week 2: Poisson Processes
- Week3: Markov Chains
- Week 4: Gaussian Processes
- Week 5: Stationarity and Linear filters
- Week 6: Ergodicity, differentiability, continuity (本文)
- Week 7: Stochastic integration & Itô formula
- Week 8: Lévy processes
- 整理隨機過程的連續性、微分、積分和Brownian Motion
Self Study: Convergence of random variables
主要參考 wikipedia 的資料筆記 Convergence of random variables
[Converge in distribution Def]:
記做 $X_n \xrightarrow[]{d}X$
Converge in distribution 是最 weak 的, 也就是滿足 converge in distribution 不一定會滿足 converge in probability 或滿足 almost surely 或滿足 converge in mean
[機率論] 兩隨機變數相等表示兩者有相同分布但反之不然, 這篇文章最後給了一個例子:
考慮均勻分布 $X$ 為隨機變數服從均勻分布 $\mathcal{U}[-1,1]$ 現在取另一隨機變數 $Y:=-X$ 則 $Y$ 亦為在 $[-1,1]$ 上均勻分布,亦即 $X$ 與 $Y$ 具有同分布。然而
$\mathcal{P}(X=Y)=0$
Converge in distribution 的其他等價定義
[Converge in probability Def]:
記做 $X_n \xrightarrow[]{p}X$
[Properties]: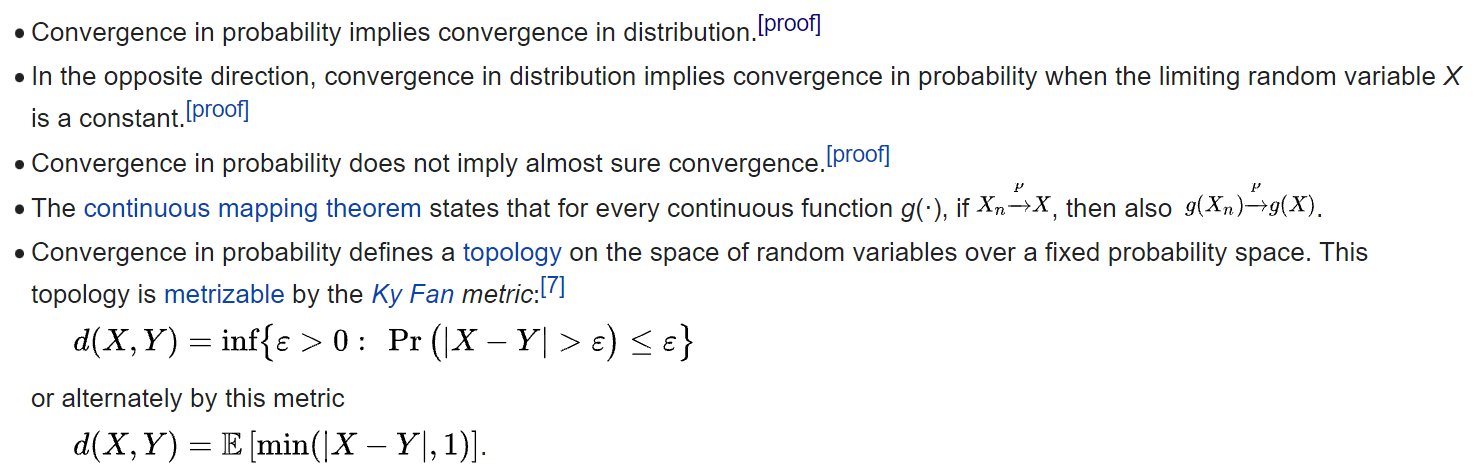
自己的想法: $X_n$ 與 $X$ 的 sample spaces 可以不同, 只要 mapping 到 $\mathbb{R}$ 之後相減就好, 所以考量的是 joint distribution
For a random process $X_t$ converges to a constant in probability sense
$X_t\xrightarrow[t\rightarrow\infty]{p} c \text{ (is const.)}$
則表示一定會 (必要條件)
$$\mathbb{E}X_t\xrightarrow[t\rightarrow\infty]{}c \\
Var(X_t)\xrightarrow[t\rightarrow\infty]{}0$$
[Almost sure convergence Def]: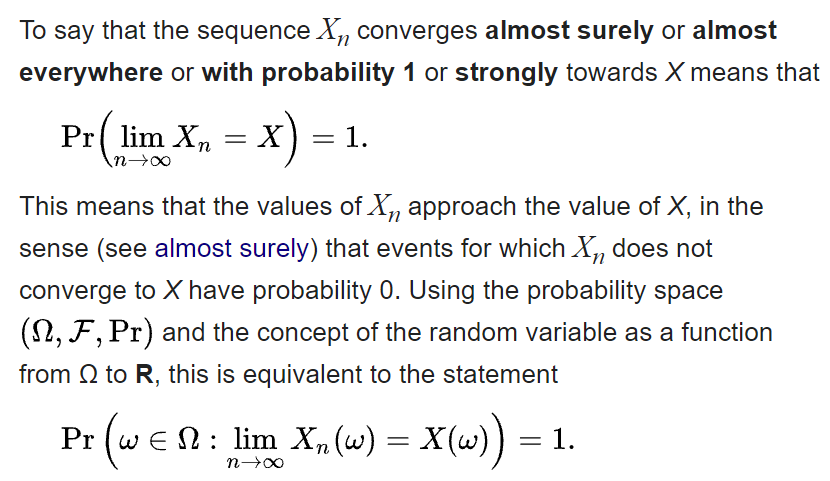
記做 $X_n \xrightarrow[]{a.s.} X$
可參考: 謝宗翰的隨筆 [機率論] Almost Sure Convergence
自己的想法: 需要 sample space 一樣, 且都是對個別 outcome 去比較的. 把所有這些符合的 outcomes 蒐集起來的集合, 其 probability measure 為 $1$.
這是一個很強的條件, 幾乎針對每一個 outcome 都要符合.
[Convergence in mean Def]:

記做 $X_n \xrightarrow[]{L^r} X$.
Convergence in the $r$-th mean, for $r\geq1$, implies convergence in probability (by Markov’s inequality). Furthermore, if $r>s\geq1$, convergence in $r$-th mean implies convergence in $s$-th mean. Hence, convergence in mean square implies convergence in mean.
It is also worth noticing that if
$$X_n\xrightarrow[]{L^r}X$$
then
$$\lim_{n\rightarrow\infty}\mathbb{E}[|X_n|^r]=\mathbb{E}[|X|^r]$$
[Relation btw Stochastic Convergences]: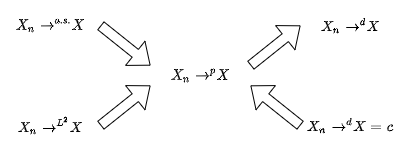
- 各種 convergence 的 proofs:
https://en.wikipedia.org/wiki/Proofs_of_convergence_of_random_variables#propA2
補上課程針對以上四個 convergences 的定義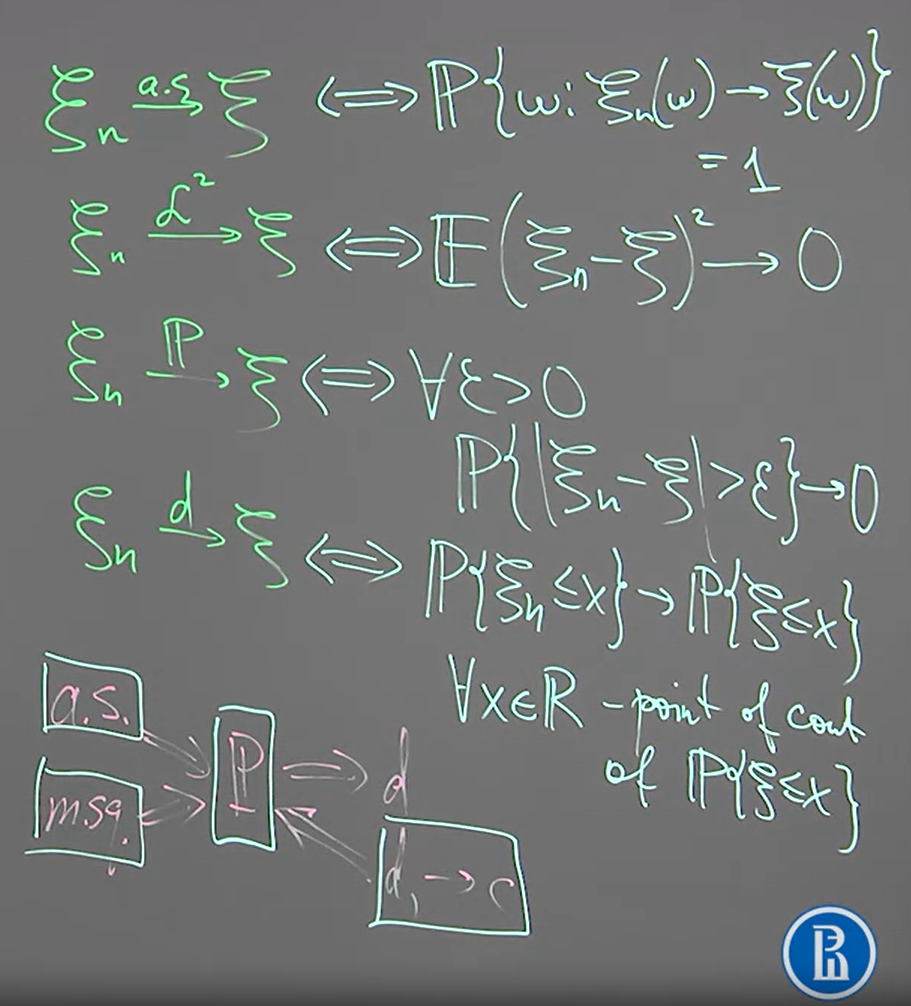
Week 6.1: Notion of ergodicity. Examples
Motivated by LLN (Law of Large Number)
[LLN Thm]:
$\xi_1,\xi_2,…$ - i.i.d. and $\mathbb{E}\xi_1<\infty$, then
$\frac{1}{N}\sum_{n=1}^N \xi_n \xrightarrow[N\rightarrow\infty]{p} \mathbb{E}\xi_1$
上式 $\xrightarrow[]{p}$ 表示 convergence in probability
但也滿足 $\xrightarrow[]{a.s.}$ almost sure convergence (Strong LLN)
Ergodicity 嘗試將 LLN 概念延伸到 stochastic process
[Ergodicity Def]:
$X_t$ is a stochastic process, where $t=1,2,3,…$
$X_t$ is said ergodic if $\exists c$ constant such that
$$M_T:=\frac{1}{T}\sum_{t=1}^T X_t
\xrightarrow[T\rightarrow\infty]{p} c$$
where $c$ is some constant. $T$ is called horizon.
And we consider convergence in probability sense.
所以要證明 ergodic 可以 $\xrightarrow[]{p}$, or $\xrightarrow[]{a.s.}$, or $\xrightarrow[]{m.sq.}$, or $\xrightarrow[]{d}c$
[Example 1]:
$X_t=\xi\sim\mathcal{N}(0,1)$, trajectory 為 constant for all $t$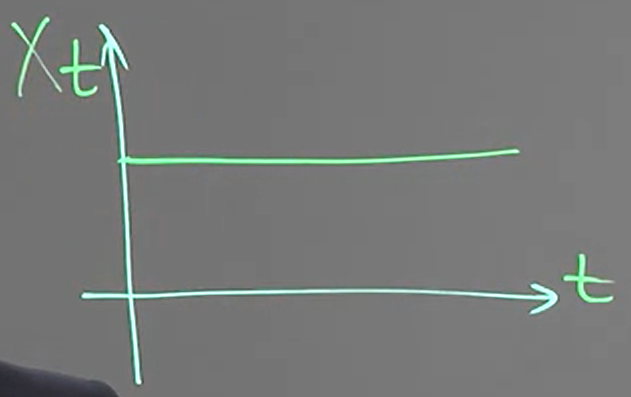
$m(t)=0,K(t,s)=Var\xi=1$
所以是 weak stationary, 我們考慮 ergodicity
$\frac{1}{T}\sum_{t=1}^T X_t=\xi\neq c$
不存在一個 constant for $T\rightarrow \infty$, 所以 non-ergodic
[Example 2]:
$X_t$ stochastic process defined as:
$X_t=\varepsilon_t+a\cos\frac{\pi t}{6}$
where $a\neq0$ and $\varepsilon_1, \varepsilon_2, …$ i.i.d. $\mathcal{N}(0,1)$
其 trajectory 為下圖曲線, 並對該曲線每個位置都有 std normal noise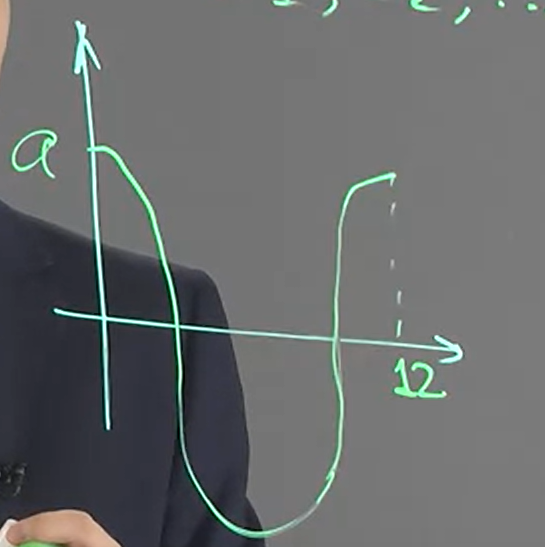
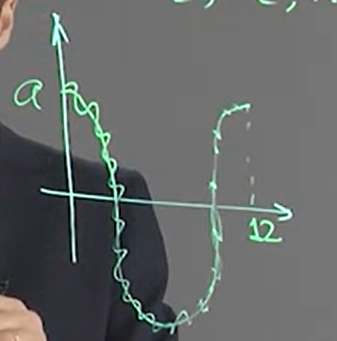
$m(t)=a\cos\frac{\pi t}{6}\neq const$, 所以不是 stationary. 考慮 ergodicity:
$\frac{1}{T}\sum_{t=1}^T X_t\sim\mathcal{N}\left(\frac{a}{T}\sum_{t=1}^T \cos\frac{\pi t}{6},\frac{1}{T}\right)$
互相獨立之 normal distributions 相加仍為 normal, mean and variance 都為相加
variance 收斂到 $0$, 觀察 mean:
由於 trajectory 是以 12 為一個週期, 所以最多只會有 12 個非 0 的值, 而每一個都小於等於 1
結論是 mean 也收斂到 $0$ (因為不管哪一個 outcome, 其 trajectory 最後都到 $0$, 所以收斂的 random variable 為 contant $0$)
所以
$\frac{1}{T}\sum_{t=1}^T X_t\sim\mathcal{N}\left(0,0\right) \text{ for }T\rightarrow\infty$
所以 $=0$ a.s. 因此是 ergodic
Example 1 是 (weak) stationary but non-ergodic
Example 2 是 non-stationary but erogodic
因此 stationary 跟 ergodic 是不同概念
Week 6.2: Ergodicity of wide-sense stationary processes
[Proposition]:
For $X_t$ is a discrete time stochastic process. Define
$$M_T=\frac{1}{T}\sum_{t=1}^TX_t\\
C(T)=Cov(X_T,M_T)$$
If $\exists\alpha$ such that the covariance function is bounded by $\alpha$, i.e.
$|K(s,t)|\leq\alpha;\forall s,t$
Then
$$Var(M_T)\xrightarrow[T\rightarrow\infty]{}0 \Longleftrightarrow
C(T)\xrightarrow[T\rightarrow\infty]{}0$$
[Stolz-Cesaro Thm]:
For $a_n,b_n\in\mathbb{R}$, $b_n$ is strictly increasing and unbounded, we have:
$\lim_{n\rightarrow\infty}\frac{a_n-a_{n-1}}{b_n-b_{n-1}}=q\Longrightarrow \frac{a_n}{b_n}\xrightarrow[n\rightarrow\infty]{}q$
See wiki for more detials and proof
當 stationary 時, 有兩個 sufficient conditions 滿足則保證 ergodic
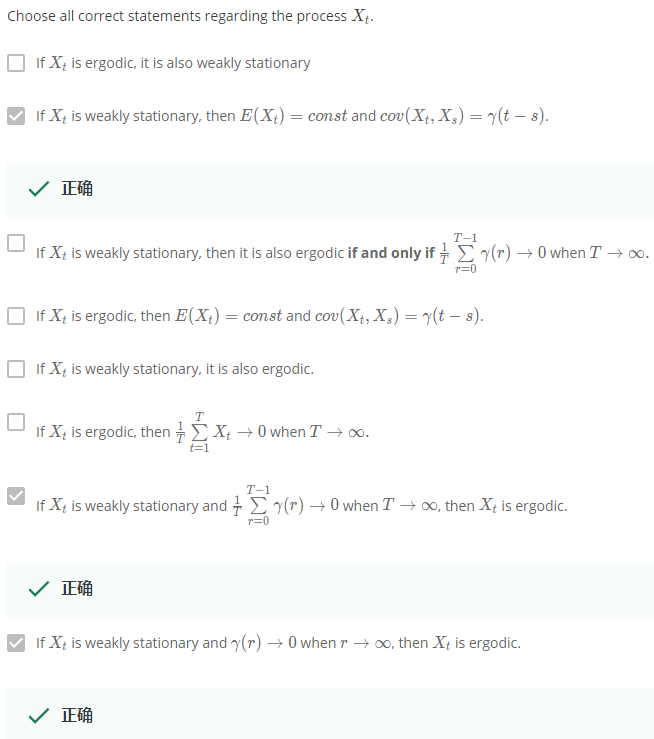
[Sufficient Conditions of Ergodicity when WSS]:
$X_t$ is weakly stationary and $\gamma(\cdot)$ is its auto-covariance function with $|\gamma(\cdot)|<\infty$.
1. Sufficient condition: If
$\frac{1}{T}\sum_{r=0}^{T-1}\gamma(r) \xrightarrow[T\rightarrow\infty]{}0$
Then $X_t$ is ergodic
2. Sufficient condition: If
$\gamma(r) \xrightarrow[r\rightarrow\infty]{}0$
Then $X_t$ is ergodic
[Proof 1]:
考慮 $C(T)$
$$C(T)=Cov\left(X_T,\frac{1}{T}\sum_{t=1}^TX_t\right) =\frac{1}{T}\sum_{t=1}^T Cov(X_T,X_t) \\
=\frac{1}{T}\sum_{t=1}^T \gamma(T-t) =\frac{1}{T}\sum_{r=0}^{T-1}\gamma(r)
\longrightarrow0\text{ (by assumption)}$$
由 proposition 知道 $Var(M_T)\rightarrow0$, as $T\rightarrow\infty$
又因為已知 $X_t$ is weakly stationary, 所以 $\exists c$ constant, s.t.
$\mathbb{E}X_t=c\Rightarrow\mathbb{E}M_t=c$
則 variance converge to $0$ as $T\rightarrow\infty$ 表示
$VarM_T=\mathbb{E}\left[(M_T-c)^2\right]\xrightarrow[T\rightarrow\infty]{}0$
則
$M_T \xrightarrow[]{L^2} c \Longrightarrow M_T \xrightarrow[]{p} c$
根據定義 $X_t$ is ergodic. Q.E.D.
[Proof 2]:
我們利用 proof 1 的結果和 Stolz-Cesaro thm, 定義
$$a_n:=\sum_{r=0}^{n-1}\gamma(r)\\
b_n:=n$$
則
$$\frac{a_n-a_{n-1}}{b_n-b_{n-1}}=\frac{\gamma(n-1)}{1}\xrightarrow[n\rightarrow\infty]{}0=q \\
\Longrightarrow \frac{a_n}{b_n} = \frac{1}{n}\sum_{r=0}^{n-1}\gamma(r)\xrightarrow[n\rightarrow\infty]{}0=q \\
\Longrightarrow X_t \text{ ergodic}$$
[Example 1]:
$N_t$ is Poisson process with $\lambda$. 給定 $p>0$, 並定義
$X_t:=N_{t+p}-N_t$
則我們可得知 $X_t$ is ergodic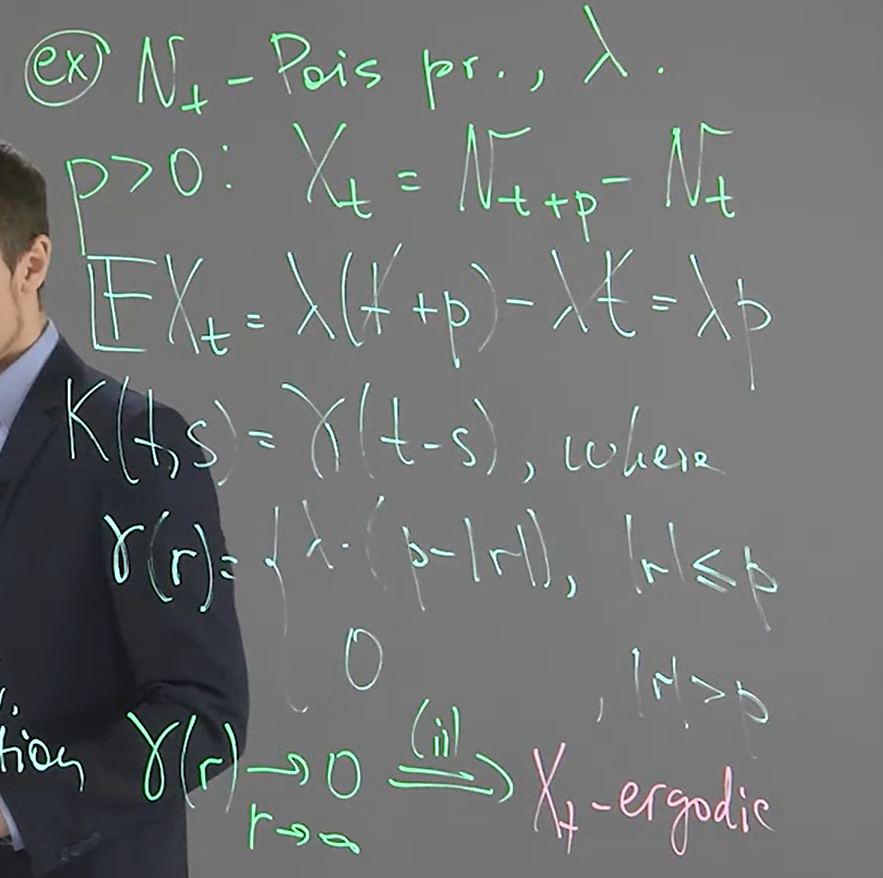
You can use the independent increment property of Poisson Process to get this formula.
$\gamma(t-s) = Cov(N_{t+p}-N_t,N_{s+p}-N_s)$
If $|s-t|>p$, then $N_{t+p}-N_t$ is independent of $N_{s+p}-N_s$, so $\gamma(t-s)=0$
If $t<s<t+p$, then $N_t$ is independent of $N_{s+p}-N_s$, so
$$Cov(N_{t+p}-N_t,N_{s+p}-N_s) = Cov(N_{t+p},N_{s+p}-N_s) \\
= Cov(N_{t+p},N_{s+p}) - Cov(N_{t+p},N_s) \\
= Cov(N_{t+p},N_{s+p} - N_{t+p} + N_{t+p}) - Cov(N_{t+p} - N_s + N_s,N_s) \\
= Var(N_{t+p}) - Var(N_s) = \lambda(t+p-s)$$
For $s<t<s+p$. you can deal with it similarly.
[Example 2]:
$A,B$ 都是 r.v.s 有如下圖的 expectation and uncorrelated relation
$\omega$ 是任意給定的 fixed value
則我們發現 $X_t$ is weakly stationary and ergodic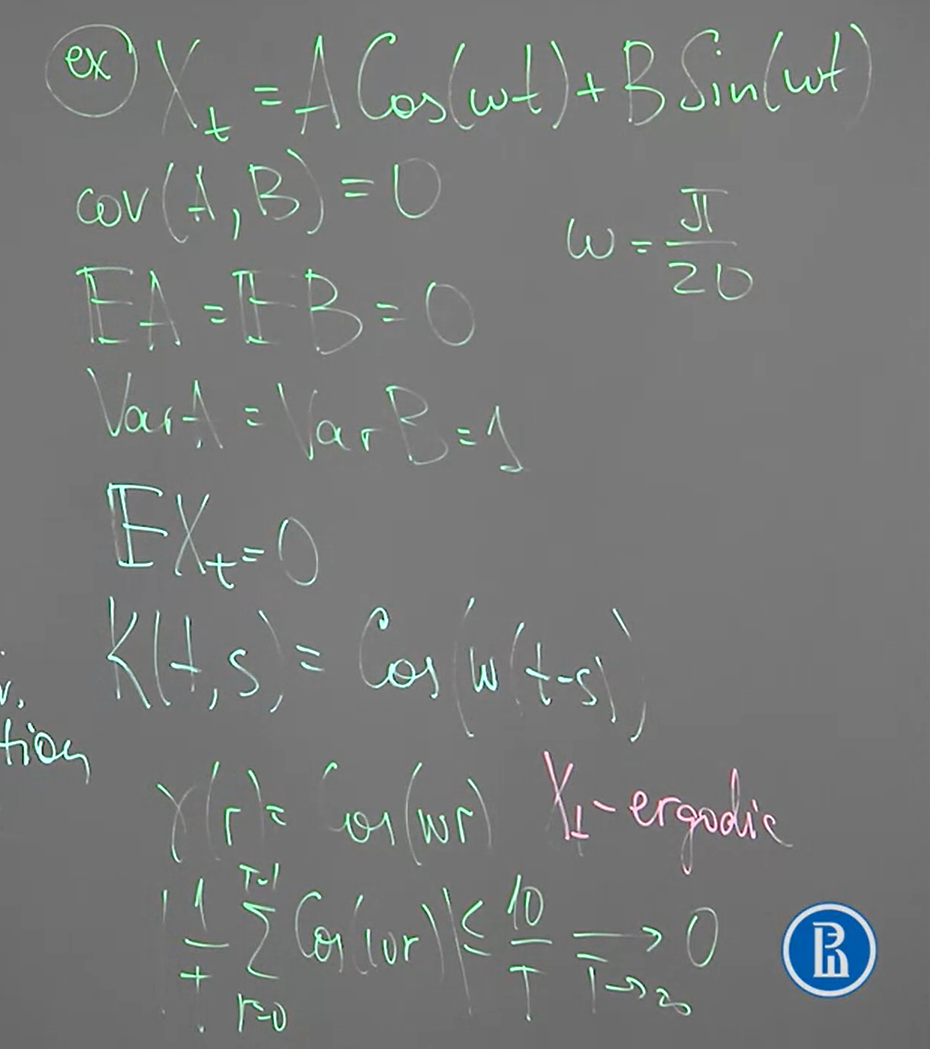
Week 6.3: Definition of a stochastic derivative
[Stochastic Derivative Def]:
We say that a random process $X_t$ is differentiable at $t=t_0$
if the following limit converges in m.sq. sense to some random variable $\eta$
$\frac{X_{t+h}-X_t}{h} \xrightarrow[h\rightarrow0]{L^2}\eta:=X_{t_0}'$
equivalently we can write as follows
$\mathbb{E}\left[\left(\frac{X_{t+h}-X_t}{h}-\eta\right)^2\right] \xrightarrow[h\rightarrow0]{}0$
[Proposition, Differentiability of Stochastic Process]:
Let $X_t$ is a stochastic process and $\mathbb{E}X_t^2<\infty$.
Then $X_t$ is differentiable at $t=t_0$ if and only if
$$\exists\frac{dm(t)}{dt}\text{, at }t=t_0 \\
\exists\frac{\partial}{\partial t\partial s}K(t,s)\text{, at }(t_0,t_0)$$
[Brownian Motion is NOT differentiable at any time $t$]: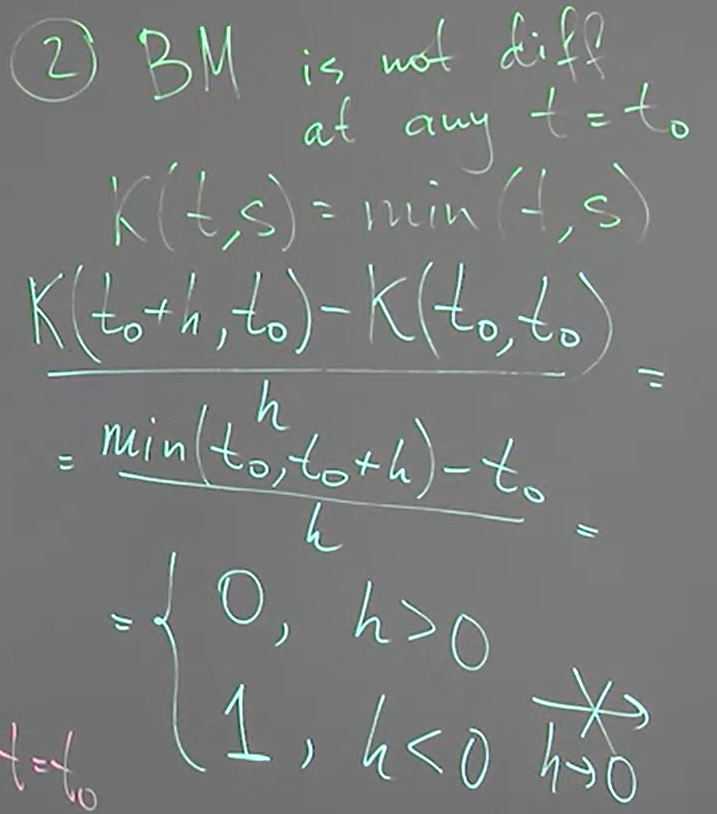
[Differentiability of Independent Increments]:
$X_t$ is independent increments and $X_0=0$ a.s. 則我們知道
$K(t,s)=Var(X_{\min(t,s)})$
因此大部分的 stochastic process with independent increments 都不是可微的.
我們寫一下 covariance function 的推導:
$$K(t,s)=Cov(X_t,X_s) \\
\text{(for t>s) }=Cov(X_t-X_s,X_s-X_0)+Cov(X_s,X_s) \\
= 0+Var(X_s)\\
\text{(consider t>s and t<s) }= Var(X_{\min(t,s)})$$
[Differentiability of Weakly Stationary]:
$X_t$ is weakly stationary. 所以 $m(t)$ is constant $\Rightarrow$ differentiable at all $t$.
我們知道 $K(t,s)=\gamma(t-s)$, 計算 partial derivatives:
$$\left.\frac{\partial^2K(t,s)}{\partial t\partial s} \right\vert_{(t_0,t_0)}
= \frac{\partial^2 \gamma(t-s) }{\partial t\partial s} \\
= \left.\frac{\partial}{\partial t} \left(-\gamma'(t-s)\right)\right|_{(t_0,t_0)}
= \left.-\gamma''(t-s)\right|_{(t_0,t_0)} \\
= -\gamma''(0)$$
所以 $X_t$ is differentiable (at any time $t$) if and only if $-\gamma’’(0)$ 存在
[Example 1]:
承上 weakly stationary differentiable. 如果 $\gamma(r)=e^{-\alpha|r|}$
則 $X_t$ is not differentiable, 因為 $-\gamma’’(0)$ 不存在 ($\gamma’(0)$ 就不存在了). $\gamma(t)$ 如下:
[Example 2]:
承上 weakly stationary differentiable. 如果 $\gamma(r)=\cos(\alpha r)$
則 $X_t$ is differentiable
Week 6.4: Continuity in the mean-squared sense
[Continuity in the probability sense Def]:
$X_t\xrightarrow[t\rightarrow t_0]{p}X_{t_0} \Longleftrightarrow \mathcal{P}(|X_t-X_{t_0}|>\varepsilon)\xrightarrow[t\rightarrow t_0]{}0, \qquad \forall\varepsilon>0$
Converges in mean-squared sense 確保了 converges in probability, 且 in m.sq. sense 比較容易確認, 因此以下著重在 in m.sq. sense
[Continuity in the mean-squared sense Def]:
$X_t\xrightarrow[t\rightarrow t_0]{L^2}X_{t_0} \Longleftrightarrow \mathbb{E}(X_t-X_{t_0})^2\xrightarrow[t\rightarrow t_0]{}0$
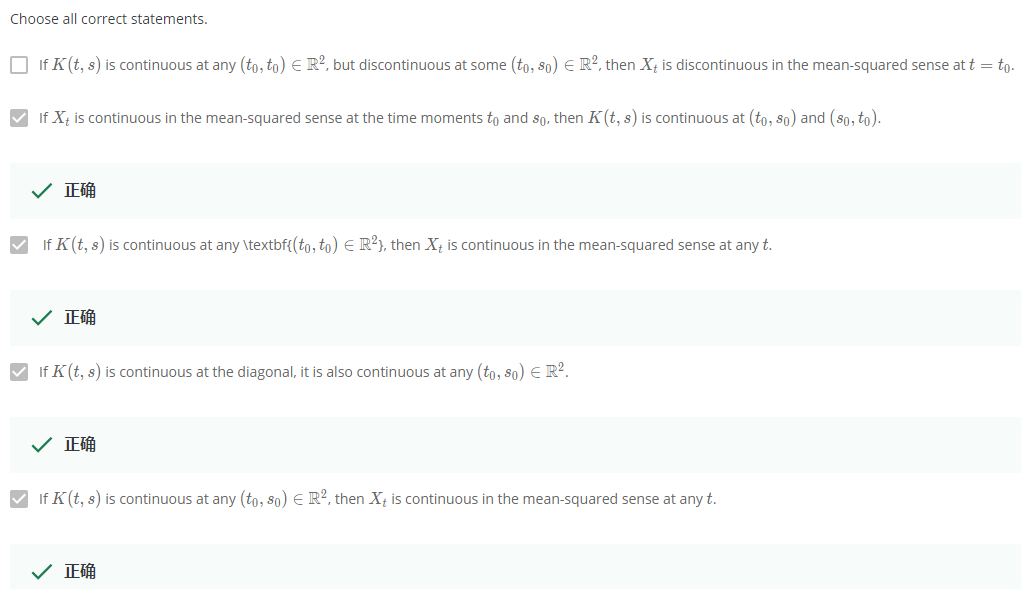
[Proposition, Continuity of Stochastic Process]:
$X_t$ stochastic process and $\mathbb{E}X_t=0$
1. If $K(t,s)$ is continuous at $(t_0, t_0)$, then $X_t$ is continuous in the m.sq. sense at $t=t_0$
2. If $X_t$ is continuous in the m.sq. sense at $t=t_0,s_0$, then $K(t,s)$ is continuous at $(t_0,s_0)$
[Proof 1]:
proved by definition of m.sq. sense
$$\mathbb{E}(X_t-X_{t_0})^2 = \mathbb{E}X_t^2-2\mathbb{E}X_tX_{t_0} + \mathbb{E}X_{t_0}^2 \\
=K(t,t)-2K(t,t_0)+K(t_0,t_0)\xrightarrow[t\rightarrow t_0]{}0$$
[Proof 2]:
$$K(t,s)-K(t_0,s_0) \\
= (K(t,s)-K(t_0,s)) + (K(t_0,s) - K(t_0,s_0))$$
使用 $\mathbb{E}X_t=0$ and 科西不等式, 考慮第一項 $K(t,s)-K(t_0,s)$
$$|K(t,s)-K(t_0,s)|=|\mathbb{E}[(X_t-X_{t_0})X_s]| \\
\leq \sqrt{\mathbb{E}(X_t-X_{t_0})^2}\cdot\sqrt{\mathbb{E}X_s^2}\\
\text{by assumption }\xrightarrow[t\rightarrow t_0]{}0$$
第二項 $K(t_0,s) - K(t_0,s_0)$ 也一樣. Q.E.D.
Differentiability 要關注 $m(t)$ and $K(t,s)$ 的微分性, 而 continuity 只關注 $K(t,s)$ 的連續性
另外對於 simplest type of stochastic integral $\int X_tdx$ 來說, 關注的是 $m(t)$ and $K(t,s)$ 的連續性
[Corollary]:
Covariance function $K(t,s)$ is continuous at $(t_0,s_0),\forall t_0,s_0$ if and only if
$K(t,s)$ is continuous at diagonal, i.e. $(t_0,t_0),\forall t_0$
[Proof]:
只需證明 $\Longleftarrow$
$K(t,s)$ is continuous at $(t_0,t_0)$, $\forall t_0$. 由 proposition 1 知道 $X_t$ is continuous in m.sq. sense $\forall t$
因此 $X_t$ is continuous in the m.sq. sense at $t=t_0,s_0$ for all points
由 proposition 2 知道 $K(t,s)$ is continuous at $(t_0,s_0),\forall t_0,s_0$
Q.E.D.