Coursera Stochastic Processes 課程筆記, 共十篇:
- Week 0: 一些預備知識 (本文)
- Week 1: Introduction & Renewal processes
- Week 2: Poisson Processes
- Week3: Markov Chains
- Week 4: Gaussian Processes
- Week 5: Stationarity and Linear filters
- Week 6: Ergodicity, differentiability, continuity
- Week 7: Stochastic integration & Itô formula
- Week 8: Lévy processes
- 整理隨機過程的連續性、微分、積分和Brownian Motion
本篇回顧一些基礎的機率複習, 這些在之後課程裡有用到.
強烈建議閱讀以下文章:
- [測度論] Sigma Algebra 與 Measurable function 簡介
- [機率論] 淺談機率公理 與 基本性質
- A guide to the Lebesgue measure and integration
- Measure theory in probability
以下回顧開始:
回顧機率知識
$e^x=\sum_{k=0}^\infty\frac{x^k}{k!}$. Proof link.
Independent of Random Variables
$X\perp Y \Longleftrightarrow \mathcal{P}(XY)=\mathcal{P}(X)\mathcal{P}(Y)$
$Cov(X,Y)=\mathbb{E}[XY]-\mathbb{E}[X]\mathbb{E}[Y]$
$$Cov(X,Y)=\mathbb{E}[(X-\mu_x)(Y-\mu_y)] \\ =\mathbb{E}[XY]-\mu_x\mathbb{E}[Y]-\mu_y\mathbb{E}[X]+\mu_x\mu_y \\ =\mathbb{E}[XY]-\mu_x\mu_y$$
[Proof]:$Var(X)=\mathbb{E}[X^2]-(\mathbb{E}[X])^2$
$$Var(X)=Cov(X,X)=\mathbb{E}[XX]-\mathbb{E}[X]\mathbb{E}[X] \\ = \mathbb{E}[X^2]-(\mathbb{E}[X])^2$$
[Proof]:
- $X,Y$ uncorrelated $\Longleftrightarrow Cov(X,Y)=0 \Longleftrightarrow \mathbb{E}[XY]=\mathbb{E}[X]\mathbb{E}[Y]$
$X\perp Y \Rightarrow$ $X,Y$ uncorrelated $\Rightarrow \mathbb{E}[XY]=\mathbb{E}[X]\mathbb{E}[Y]$
Covariance 是線性的: $Cov(aX+bY,cZ)=acCov(X,Z)+bcCov(Y,Z)$
$$Cov(aX+bY,cZ)=\mathbb{E}[(aX+bY)cZ]-\mathbb{E}[aX+bY]\mathbb{E}[cZ] \\ = ac\mathbb{E}[XZ]+bc\mathbb{E}[YZ]-ac\mathbb{E}[X]\mathbb{E}[Z]-bc\mathbb{E}[Y]\mathbb{E}[Z] \\ = ac(\mathbb{E}[XZ]-\mathbb{E}[X]\mathbb{E}[Z])+bc(\mathbb{E}[YZ]-\mathbb{E}[Y]\mathbb{E}[Z]) \\ = acCov(X,Z)+bcCov(Y,Z)$$
[Proof]:[Characteristic Function Def]:
For random variable $\xi$, 定義 characteristic function $\Phi:\mathbb{R}\rightarrow \mathbb{C}$ 為
$$\Phi_\xi(u) = \mathbb{E}\left[ e^{iu\xi} \right]$$如果 $\xi_1\perp\xi_2$, 則
$\Phi_{\xi_1+\xi_2}(u)=\Phi_{\xi_1}(u)\Phi_{\xi_2}(u)$[Proof]:
$$\Phi_{\xi_1+\xi_2}(u)=\mathbb{E}[e^{iu(\xi_1+\xi_2)}]=\mathbb{E}[e^{iu\xi_1}e^{iu\xi_2}] \\ = \int_{\xi_1,\xi_2} \mathcal{P}(\xi_1,\xi_2)e^{iu\xi_1}e^{iu\xi_2} d\xi_1 d\xi_2 \\ = \int_{\xi_1,\xi_2} \left(\mathcal{P}(\xi_1)e^{iu\xi_1}\right)\left(\mathcal{P}(\xi_2)e^{iu\xi_2}\right) d\xi_1 d\xi_2 \\ =\mathbb{E}[e^{iu\xi_1}]\mathbb{E}[e^{iu\xi_2}] \\ =\Phi_{\xi_1}(u)\Phi_{\xi_2}(u)$$$\mathbb{E}[X+Y]=\mathbb{E}[X]+\mathbb{E}[Y]$. 跟 $X,Y$ 是否獨立或不相關無關.
$|Cov(X,Y)|\leq\sqrt{Var(X)}\sqrt{Var(Y)}$
[Proof]: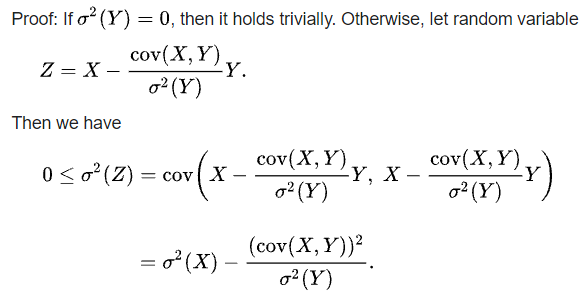
$Var(X+Y)=Var(X)+Var(Y)+2Cov(X,Y)$
$$Var(X+Y)=Cov(X+Y,X+Y)\\ =Cov(X,X)+2Cov(X,Y)+Cov(Y,Y)\\ =Var(X)+Var(Y)+2Cov(X,Y)$$
[Proof]:如果 $X,Y$ uncorrelated (所以 $X\perp Y$ 也成立), 則 $Var(X+Y)=Var(X)+Var(Y)$
Normal distribution of one r.v.
$$X\sim\mathcal{N}(\mu,\sigma^2), \text{ for }\sigma>0,\mu\in\mathbb{R} \\ p(x)=\frac{1}{\sqrt{2\pi}\sigma} e^{-\frac{(x-\mu)^2}{2\sigma^2}}$$The characteristic function of normal distribution is:
$\Phi(u)=e^{iu\mu-\frac{1}{2}u^2\sigma^2}$獨立高斯分佈之和仍為高斯分佈, mean and variance 都相加
$(X_1,...,X_n) \text{ where } X_k\sim\mathcal{N}(\mu_k,\sigma_k^2),\forall k=1,...,n$
[Proof]:我們知道
$$X_k\sim\mathcal{N}(\mu_k,\sigma_k^2)\longleftrightarrow \Phi_k(u)=e^{iu\mu_k-\frac{1}{2}u^2\sigma_k^2}$$則
$$\sum_k X_k \longleftrightarrow \prod_k \Phi_k(u) = e^{iu(\sum_k \mu_k)-\frac{1}{2}u^2(\sum_k \sigma_k^2)}$$由特徵方程式與機率分佈一對一對應得知
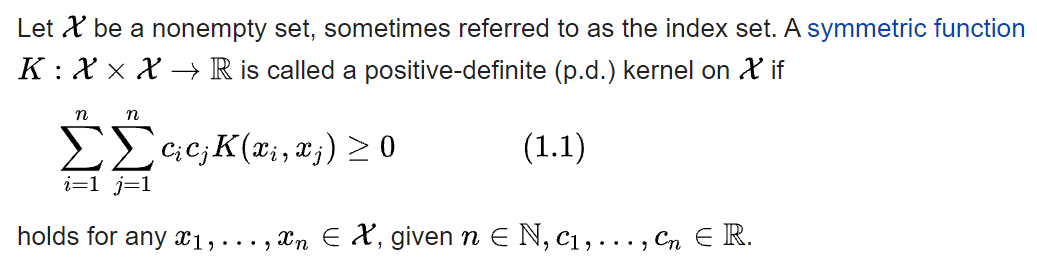
$\sum_k X_k \sim \mathcal{N}\left(\sum_k \mu_k, \sum_k \sigma_k^2\right)$$K:\mathcal{X}\times\mathcal{X}\rightarrow\mathbb{R}$ is symmetric positive semi-definite:
給定 $t_1<t_2<…<t_n$ 一個很有用的技巧為:
$(t_2-t_1),...,(t_n-t_{n-1})$
可以變成以下這些 disjoint 區段的線性組合具體如下:
$$\sum_{k=1}^n \lambda_k B_{t_k} = \lambda_n(B_{t_n}-B_{t_{n-1}}) + (\lambda_n+\lambda_{n-1})B_{t_{n-1}} + \sum_{k=1}^{n-2} \lambda_k B_{t_k} \\ = \sum_{k=1}^n d_k(B_{t_n}-B_{t_{n-1}})$$會想要這樣轉換是因為課程會學到 independent increment 特性, 表明 disjoint 區段的 random variables 之間互相獨立, 因此可以變成互相獨立的 r.v.s 線性相加
Calculating Moments with Characteristic Functions (wiki))

Brownian Motion reference
Brownian Motion by Hartmann.pdfLebesgue Measure and Integration
A guide to the Lebesgue measure and integration
Lebesgue integration from wiki
[測度論] Sigma Algebra 與 Measurable function 簡介Probability Theory
[機率論] 淺談機率公理 與 基本性質
Measure theory in probability
Distribution function $F$ defined with (probability) measure $\mu$ (ref)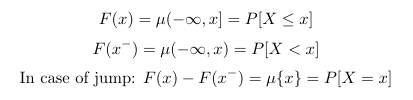
$F$ 又稱 cumulative distribution function (c.d.f.), 或稱 cumulative function
其微分稱為 probability density function (p.d.f.), 或簡稱 density function. 注意到 density 不是 (probability) measure $\mu$!
而期望值可以用 Lebesgue measure or in probability measure 來看待:
Given Probability space: $(\Omega,\Sigma,\mathcal{P})$, 期望值定義為
所有 event $\omega\in\Sigma$ 的 probability measure $\mathcal{P}(\omega)$, 乘上該 random variable 的值 $X(\omega)$
所有 outcome $\omega\in\Omega$ 的 probability measure $\mathcal{P}(d\omega)$, 乘上該 random variable 的值 $X(\omega)$Lebesgue’s Dominated Convergence Theorem: Exchanging $\lim$ and $\int$
$|f_n(x)|\leq g(x), \qquad \forall n,\forall x\in S$
Let $(f_n)$ be a sequence of measurable functions on a measure space $(S,\Sigma,\mu)$. Assume $(f_n)$ converges pointwise to $f$ and is dominated by some (Lebesgue) integrable function $g$, i.e.Then $f$ is (Lebesgue) integrable, i.e. $\int_S |f|d\mu<\infty$
$$\lim_{n\rightarrow\infty}\int_S |f_n-f|d\mu=0 \\ \lim_{n\rightarrow\infty}\int_S f_nd\mu = \int_S\lim_{n\rightarrow\infty}f_nd\mu = \int_S f d\mu$$
and