- 2024/07/28 更新 (見本文最後一段): 補充與 Langevin Dynamics 的關係, 這是我們在 [Score Matching 系列 (五) SM 加上 Langevin Dynamics 變成生成模型] 裡提到一旦訓練出 score function 後, 模型使用的採樣技術. 另外 Score Match + Langevin Dynamics (SMLD) 這種生成模型事實上跟 DDPM (Denoising Diffusion Probabilistic Models) 是一樣的! Yang Song 這篇 2021 ICLR best paper award (Score-Based Generative Modeling through Stochastic Differential Equations) 闡明了 SMLD 跟 DDPM 其實是兩種不同的觀點, 都可以用相同的 SDE (Stochastic Differential Equation) 來表達.
先說我物理什麼的都還給老師了, 只能用自己理解的方式, 筆記下 Hamiltonian dynamic.
💡 如果連我都能懂, 相信大家都能理解 HMC 了
但還是建議先看 MCMC by Gibbs and Metropolis-Hasting Sampling, 因為這篇要說的 Hamiltonian Monte Carlo (HMC) 是 Metropolis-Hastings (MH) 方法的一種, 只是 proposal distribution 從 random walk 改成使用 Hamiltonian dynamics 來做, 因而變的非常有效率 (accept rate 很高), 且對於高維度資料採樣也很有效.
首先粗體字如 $\mathbf{x}, \mathbf{v}, \mathbf{p}$ 都是 column vector, 而非粗體字表 scalar, e.g. $m,t$
Hamiltonian dynamic
一物體在位置 $\mathbf{x}$ (這裡可想成是高度) 的重力位能 (potential energy) 為
$$\begin{align} U(\mathbf{x})=m\mathbf{g}^T\mathbf{x} \end{align}$$其中 $m$ 表質量, $\mathbf{g}$ 表重力加速度 (是個向量, 所以有方向性).
同時該物體, 其本身也存在動能 (kinetic energy) 且可表示為:
$\mathbf{v}$ 表速度 (是個向量, 所以有方向性), $\mathbf{p}$ 我們稱為動量 (momentum).
整個封閉系統 (沒有外界的其他能量介入) 的能量為:
根據能量守恆 (energy conservation), 不管時間 $t$ 是什麼, 整個系統的能量 $H(\mathbf{x},\mathbf{p})$ 都維持相同.
此時如果我們知道該物體的初始狀態 $(\mathbf{x}_0,\mathbf{p}_0)$ 的話, 事實上可以知道任何時間 $t$ 下的位置和動量 $(\mathbf{x},\mathbf{p})$
而這樣的關係可以由下面的 Hamiltonian equations 描述出來:
其中 $i\in\{1,..,d\}$, $d$ 表空間的維度.
只要使用 $\mathbf{p}=m\mathbf{v}$, 速度 $\mathbf{v}$ 是 $\mathbf{x}$ 對時間的微分, 以及
速度對時間的微分等於負加速度 $-\mathbf{g}$ (座標系統定義為往上的座標是正的, 而重力加速度是向下的, 所以值為負)
就可以從 (5) 推導出 (6) 和 (7).
$$\frac{\partial H}{\partial p_i}=\frac{\partial K(\mathbf{p})}{\partial p_i}=\frac{\partial}{\partial p_i}\frac{\sum_j p_j^2}{2m}=\frac{p_i}{m}=\frac{m v_i}{m}=v_i=\frac{dx_i}{dt} \\ \frac{\partial H}{\partial x_i}=\frac{\partial U(\mathbf{x})}{\partial x_i}=\frac{\partial m\sum_j g_jx_j}{\partial x_i}=mg_i=m\frac{d(-v_i)}{dt}=-\frac{dmv_i}{dt}=-\frac{dp_i}{dt}$$
所以如果已知時間 $t$ 的位置 $x_i(t)$, 想預估 $t+\varepsilon$ 的位置 $x_i(t+\varepsilon)$ 的話, 可以透過 (6) 的方式更新:
$$x_i(t+\varepsilon)\approx x_i(t)+\varepsilon\cdot\frac{dx_i(t)}{dt}=x_i(t)+\varepsilon\cdot\frac{\partial K(\mathbf{p}(t))}{\partial p_i} \\ =x_i(t)+\varepsilon\cdot\frac{\partial\left(\mathbf{p}(t)^T\mathbf{p}(t)/2m\right)}{\partial p_i} = x_i(t)+\varepsilon\cdot\frac{p_i(t)}{m}$$只要 $\varepsilon$ 夠小的話, 就會夠接近.
同理 $p_i(t+\varepsilon)$ 也能用 (7) 估計出來. 總結為以下 update 方法 (令 $m=1$), 而這個方法稱為 Euler’s method:
但致命的缺點是一旦時間長了, 估計就愈來愈不準了. 因此實作上會採用 Leapfrog method: pdf 介紹.
我們先看看兩種方法的精確度差異 (取自 DeepBayes 2019 Summer School Day 5, MCMC slides):
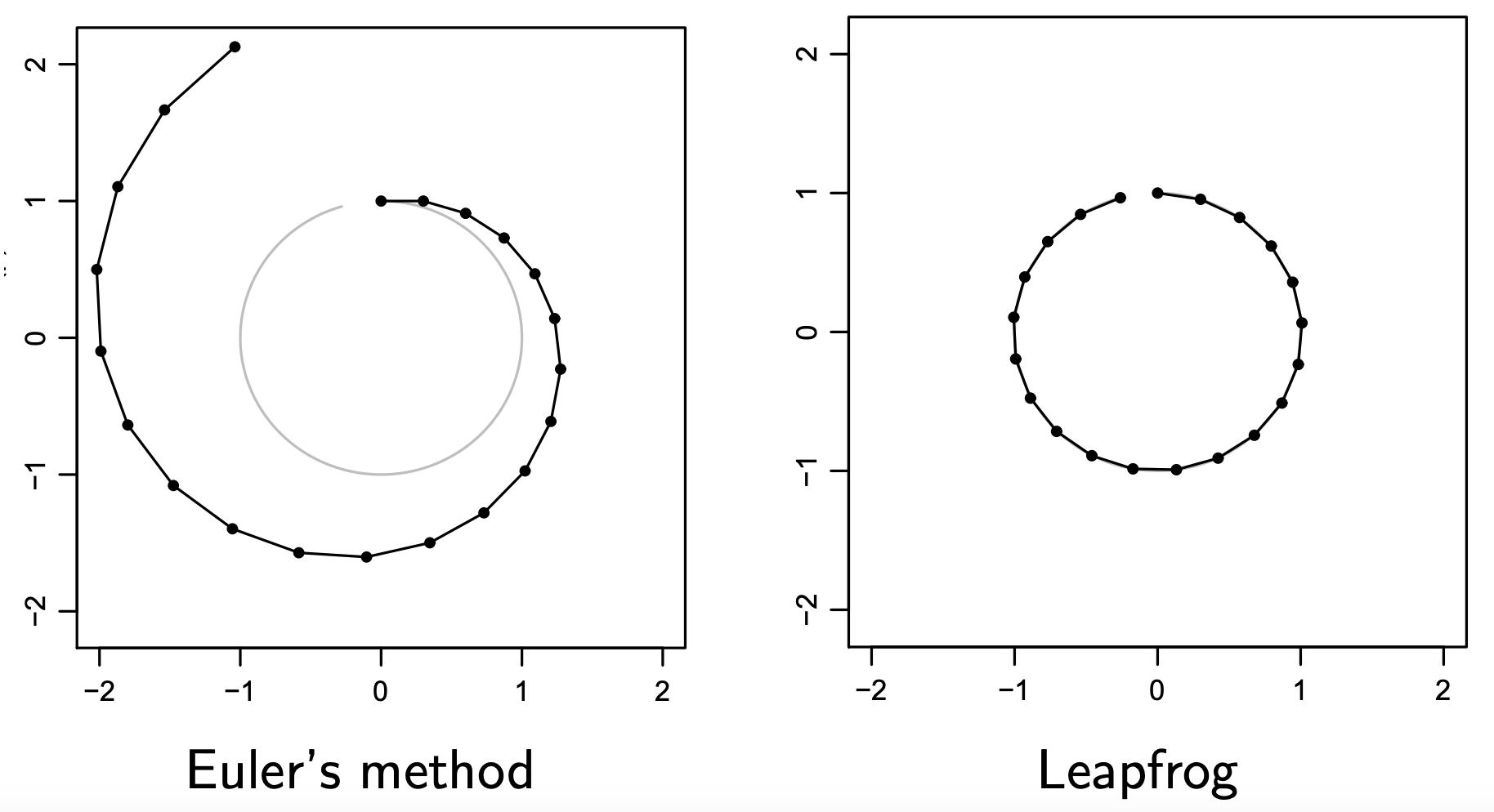
Leapfrog method 描述如下:
$$\begin{align} p_i(t+\varepsilon/2)=p_i(t)-(\varepsilon/2)\cdot\frac{\partial U(\mathbf{x}(t))}{\partial x_i} \\ x_i(t+\varepsilon)=x_i(t)+\varepsilon \cdot p_i(t+\varepsilon/2) \\ p_i(t+\varepsilon)=p_i(t+\varepsilon/2)-(\varepsilon/2)\cdot\frac{\partial U(\mathbf{x}(t+\varepsilon))}{\partial x_i} \end{align}$$主要的想法是, 在 update $x_i(t+\varepsilon)$ 時 (式 (8)), 原來使用 $p_i(t)$ 來更新, 改成使用”更準的” $p_i(t+\varepsilon/2)$ 來更新, 如同式 (11). 然後 $p_i(t+\varepsilon)$ 分成兩次的 $\varepsilon/2$ steps 來更新.
抱歉沒有嚴謹的數學來證明 error 的 order.
注意到, 我們只需要 $\nabla_\mathbf{x}U(\mathbf{x})$ 就能更新 $(\mathbf{x},\mathbf{p})$!
也就是說只要有 potential energy 的 gradient 就可以模擬 Hamiltonian dynamic!
這點很重要, 因為變成 sampling 方法後等同於這句話: 只要有 score function 就能採樣! 而 score function 怎麼估計, Score Matching 是個好方法.
Sample codes from (Markov Chain Monte-Carlo Solution.ipynb):
|
|
彈簧例子
參考自 MCMC: Hamiltonian Monte Carlo (a.k.a. Hybrid Monte Carlo)
不知道怎麼來的也沒關係, 反正此時的系統能量為:
位置 $x$ 的參考原點定義在彈簧中心, 也就是剛好 potential energy 為 $0$ 的時候. 使用 Leapfrog method 來模擬 Hamiltonian equations 更新狀態 $(\mathbf{x},\mathbf{p})$:
可以看到 Hamiltonian dynamic 的過程, 能量上 (左下角的圖) 只是 potential 和 kinetic energy 的互相交換 (黃色和青色互相消長), 其總能量是不變的.
哎不對~總能量 $H$ 的那條全黃色的 bar 沒有固定不動啊, 看起來還是會小幅度上上下下的.
是的, 縱使用了 Leapfrog method, 還是會漂移, 這是因為我們對時間離散化造成的. 想要 error 更小, 就必需切更細碎的時間去逼近.
另外需要特別說明, 右下角的 “Phase Space” 圖, 畫出了 $(x,p)$ 狀態值的移動路徑. 由於能量守恆, 這路徑代表了相同的 Hamiltonian energy. 為什麼要特別說明這點, 在後面講 sampling 的時候會再次提到.
能量怎麼看成機率分佈? 或反過來?
給定能量 $E(x)$, 總是可以用下式變成機率分佈 (Gibbs distribution):
$$p(x)=\frac{1}{Z}e^{-E(x)}$$$Z$ 就是一個 normalization constant 變成機率分佈用的. 所以能量愈大表示的機率密度就愈小.
我們來將 Hamiltonian energy 變機率分佈看看:
這裡可以發現 $\mathbf{x}$ 與 $\mathbf{p}$ 互相獨立.
原本從物理那邊我們是先定義了能量, 再利用 Gibbs distribution 變成了機率分佈.
現在我們反過來操作: 先定義我們要的機率分佈, 然後反推能量長什麼樣.
🤔 題外話, 寫到這我就在想, 反過來從先定義機率分布再推導能量是不是仍然能滿足 energy conservation?
i.e. 能量隨時間不變.
$$\begin{align} \frac{dH(x,p)}{dt}=0 \end{align}$$
但其實不用擔心, 因為只要用 Hamiltonian equations (6), (7) 去更新狀態, 就會滿足 energy conservation.
我們考慮 1-D case 即可, 能量為 $H(x(t),p(t))$, 滿足 (6) and (7) 並觀察
$$\frac{dH(x(t),p(t))}{dt}=\frac{dH}{dx}\frac{dx}{dt}+\frac{dH}{dp}\frac{dp}{dt} \\ \text{by }(6)=\frac{dH}{dx}\frac{dH}{dp}+\frac{dH}{dp}\frac{dp}{dt} \\ \text{by }(7)=\frac{dH}{dx}\frac{dH}{dp}-\frac{dH}{dp}\frac{dH}{dx}=0$$
因為互相獨立, 我們可以先定義 $\mathbf{p}$ 是 normal distribution $\mathcal{N}(\mathbf{p}|0,I)$
$$p(\mathbf{p})=\frac{1}{Z_\mathbf{p}}e^{-\frac{\mathbf{p}^T\mathbf{p}}{2}}$$可以看得出來其 (kinetic) energy 為:
$$\begin{align} K(\mathbf{p})=\frac{\mathbf{p}^T\mathbf{p}}{2} \end{align}$$然後不要忘記我們的目的是要從一個目標分佈 $p^*(\mathbf{x})$ 取樣, 因此 $\mathbf{x}$ 的機率分佈就直接定義成目標分佈. 而其 (potential) energy 為:
$$\begin{align} p^*(\mathbf{x})=\frac{1}{Z_\mathbf{x}}e^{-U(\mathbf{x})} \\ \Longrightarrow U(\mathbf{x})=-\log p^*(\mathbf{x}) + \text{const.} \end{align}$$還記得我們之前說過這句話嗎? “我們只需要 $\nabla_\mathbf{x}U(\mathbf{x})$ 就能更新 $(\mathbf{x},\mathbf{p})$!”
因此 (16) 的 $\text{const.}$ 就不重要了, 所以 potential energy 這麼定義就可以了:
MHC 採樣過程
好了, 到目前為止我們藉由設定好的 distribution $p^*(\mathbf{x}),\mathcal{N}(\mathbf{p}|0,I)$, 可以找到對應的 energy functions $U(\mathbf{x}),K(\mathbf{p})$.
那就可以套用 Hamiltonian equations (6), (7) 來模擬能量不變的情形下, $(\mathbf{x},\mathbf{p})$ 隨時間的變化.
給定一個初始狀態 $(\mathbf{x}_0,\mathbf{p}_0)$ 可以得到:
其中 $H(\mathbf{x}_0,\mathbf{p}_0)=H(\mathbf{x}_1,\mathbf{p}_1)=...$
實作上由於每一次 (6), (7) 的更新都採用很小的 $\varepsilon$ (Leapfrog sample codes 裡的 self.eps), 這樣才能確保夠準確.
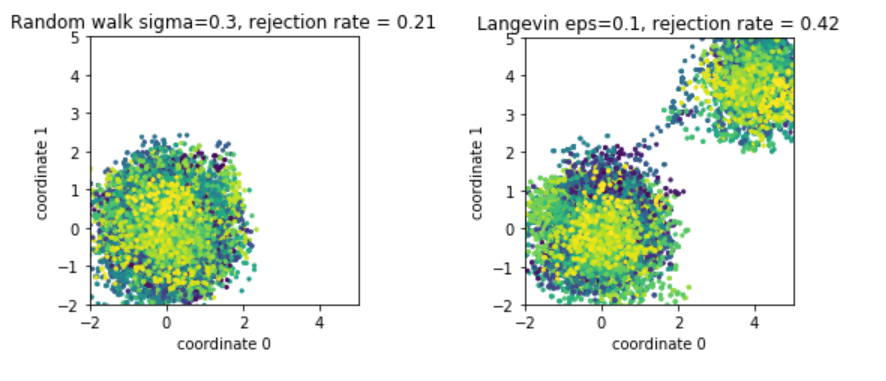
但我們也希望能夠走遠一些 (這對 multi-modual 的 distribution 很有幫助, 如下圖所示), 所以會跑個 $T$ 步 updates (Leapfrog sample codes 裡的 self.n_steps)
但就算如此, 由於 energy conservation (13) 的關係, $\mathbf{x}$ 只會在 phase space 上具有相同能量的 contour 上採樣.
(Phase space 定義為 $(\mathbf{x},\mathbf{p})$ 的空間)
為了能夠採樣出其它的點, 我們需要換到其他能量的 contour, 因此改變 $\mathbf{p}$, 即對它重新採樣即可.
(follow 之前定義好的分佈 $\mathcal{N}(\mathbf{p}|0,I)$).
但是別忘了, Hamiltonian MC 所提出的採樣是 Metorpolis-Hastings 的 proposal distribution. 所以也需要有 accept/reject, 但也得益於 energy conservation 所以會有非常高的 accept rate. 因而採樣效率很好.
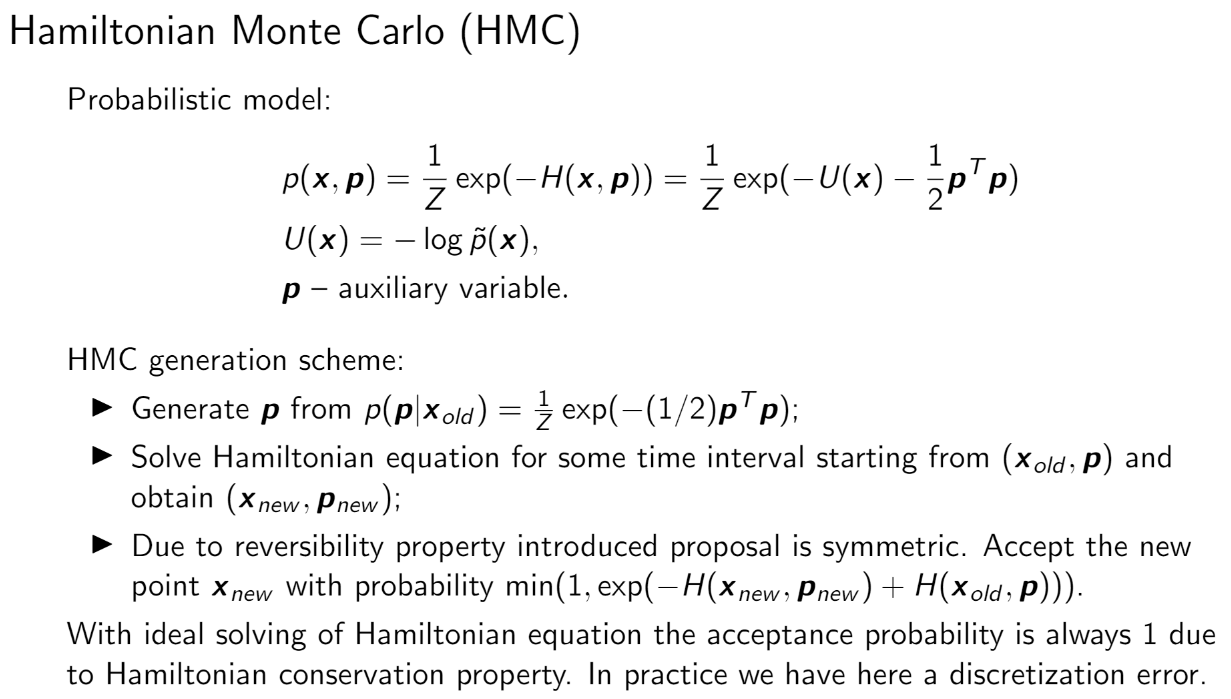
總結一下 HMC 方法 [ref 3]:
而 Tuning HMC 有幾個要點 [ref 3]:
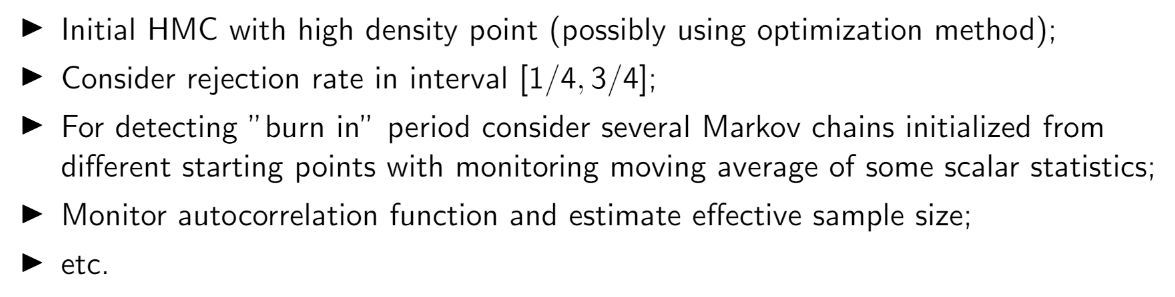
一般來說要控制 rejection rate 在 $[1/4,3/4]$ 之間會比較好. 還有多跑幾個 threads 來確認收斂狀況.
與 Langevin Dynamics 的關係
先總結一下 Hamiltonian Monte Carlo (HMC) 是 Metropolis-Hastings (MH) 方法的一種, 只是 proposal distribution 從 random walk 改成使用 Hamiltonian dynamics 來做 (式 (6)(7) 的更新)
HMC 有一個特點是, 可以只用 $\nabla_\mathbf{x}U(\mathbf{x})$ 就能對目標分佈 $p(\mathbf{x})$ 取樣, 說精確一點是對 joint pdf $p(\mathbf{x}, \mathbf{p})$ 採樣, 我們透過 MH 的 accept/rejection 機制變成對 $p(\mathbf{x})$ 取樣
實務上 Hamiltonian dynamics 的更新步驟使用 leapfrog method (式 (10)-(12)), 如果只用 single leapfrog step 其實就 reduce 成 Langevin Monte Carlo (LMC) [6], 而其更新步驟就稱為 Langevin Dynamics
擷取參考資料[6]最後一頁:
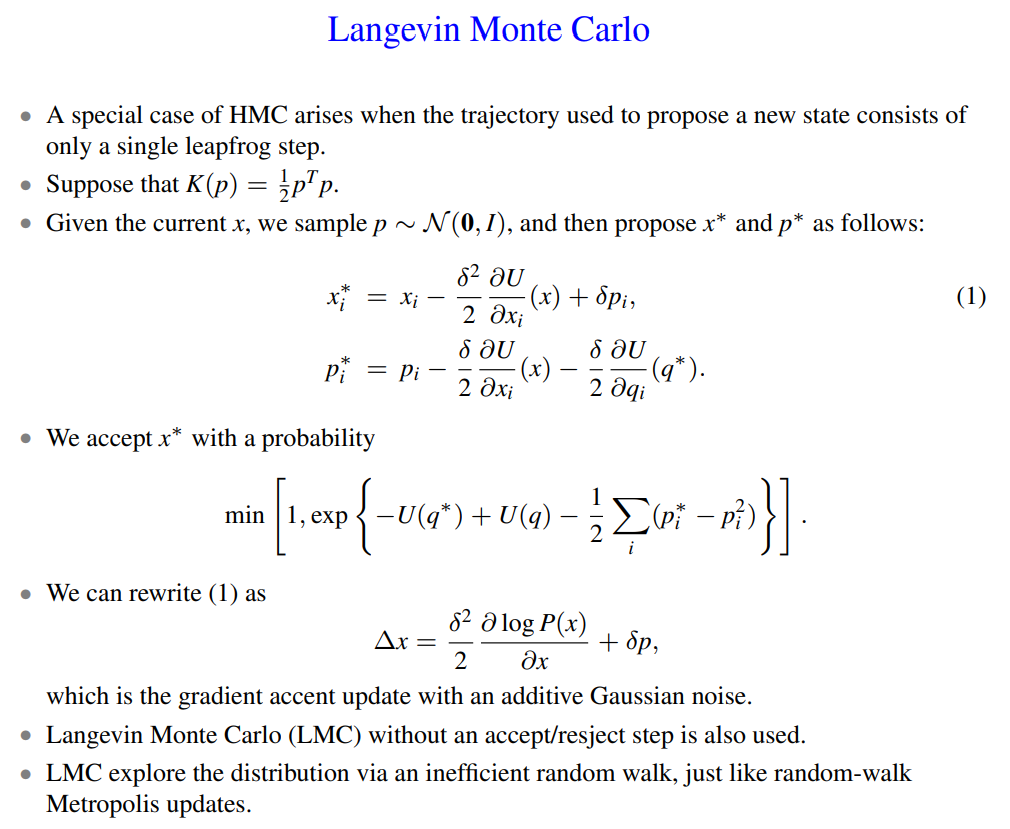
通常在 DDPM (Denoising Diffusion Probabilistic Models) or SMLD (如同本文開頭說的這兩個只是不同角度下看相同的問題) 裡面用 Langevin Dynamics 更新後, 直接省略 MH 的 accept/reject 機制.
重複一下上面投影片寫的 Langevin Dynamics:
$$\begin{align}
\Delta\mathbf{x}=\frac{\delta^2}{2}\nabla_\mathbf{x}\log p(\mathbf{x}) + \delta\mathbf{p}
\end{align}$$ 其中 $\mathbf{p}$ 一樣從 $\mathcal{N}(\mathbf{p}|0,I)$ 採樣
所以在 SMLD 中, 目標就是訓練出 score function NN $s_\theta(\mathbf{x})$ 來取代 $\nabla_\mathbf{x}\log p(\mathbf{x})$ 就可以用 score function 採樣了
最後 Langevin Dynamics 採樣還可以從另一種方式推導: 先假設粒子運動遵從 Langevin Dynamics 可以發現每個時間點粒子的機率分佈遵從 Fokker-Planck equation, 而當時間點無窮大時, Fokker-Planck equation 可以發現會有穩態分佈, 所以反向來說如果穩態分佈能設定成我們要採樣的目標分佈, 那一切就大功告成! (許久之前閱讀的, 如有錯誤歡迎包含並指證)
[DeepBayes2019] Day 5, Lecture 3. Langevin dynamics for sampling and global optimization [YouTube], 影片的解說真的非常棒, 可以一步一步跟著推導理解! 或直接參考 odie’s Whisper 的筆記.
MCMC, Metropolis Hastings, Hamiltonian Dynamic, Langevin Dynamics, Fokker-Planck equation, Score Maching and DDPM 這一系列龐大且精美的數學串連起來現在除了 LLM 之外, 另一種強大的 GenAI (e.g. Imagen, Midjourney, Stability AI, …). 讓我們一起念咒語: Diffusion model 萬歲, 萬萬歲
但老實說我快要被淹沒了… 救命啊… 咕嚕咕嚕
References
- 马尔可夫链蒙特卡洛算法 (二) HMC
- MCMC: Hamiltonian Monte Carlo (a.k.a. Hybrid Monte Carlo)
- DeepBayes 2019 Summer School Day 5, MCMC slides
- MHC sample codes from (https://github.com/bayesgroup/deepbayes-2019/blob/master/seminars/day5/Markov Chain Monte-Carlo Solution.ipynb)
- Leapfrog method: https://www2.atmos.umd.edu/~ekalnay/syllabi/AOSC614/NWP-CH03-2-2.pdf
- Hamiltonian Monte Carlo and Langevin Monte Carlo
- Denoising Diffusion Probabilistic Models
- Score-Based Generative Modeling through Stochastic Differential Equations
- [DeepBayes2019] Day 5, Lecture 3. Langevin dynamics for sampling and global optimization [YouTube]
- odie’s Whisper, Langevin Dynamics 抽樣方法